非线性控制系统.pdf,非线性控制系统概述
时间:2024-11-30 来源:网络 人气:
非线性控制系统概述
非线性控制系统是指系统中的数学模型包含非线性项的控制系统。与线性控制系统相比,非线性控制系统具有更复杂的动态特性,其行为可能难以预测。非线性控制系统在许多实际应用中具有重要意义,如航空航天、机器人技术、生物医学工程等领域。
非线性控制系统的特点
非线性控制系统的特点主要包括以下几点:
动态特性复杂:非线性系统的动态行为可能表现出饱和、混沌、极限环等现象,这使得系统分析变得困难。
参数敏感性:非线性系统的参数变化可能导致系统性能的显著变化,这使得系统设计需要更加谨慎。
稳定性分析困难:线性控制系统的稳定性分析相对简单,而非线性控制系统的稳定性分析通常需要借助数值方法或定性分析方法。
控制策略多样:非线性控制系统可以采用多种控制策略,如反馈线性化、滑模控制、自适应控制等。
非线性控制系统的建模方法
非线性控制系统的建模方法主要包括以下几种:
基于物理原理的建模:根据系统的物理原理,建立系统的数学模型。这种方法适用于具有明确物理背景的系统。
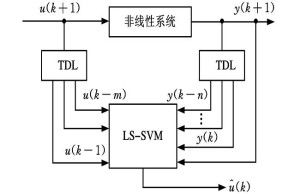
基于实验数据的建模:通过实验获取系统输入输出数据,利用数据驱动方法建立系统的数学模型。这种方法适用于难以建立物理模型的系统。
基于机理建模:根据系统的机理,建立系统的数学模型。这种方法适用于具有明确机理的系统。
非线性控制系统的分析方法
非线性控制系统的分析方法主要包括以下几种:
相平面分析法:通过绘制系统的相平面图,分析系统的动态行为。这种方法适用于一阶和二阶非线性系统。
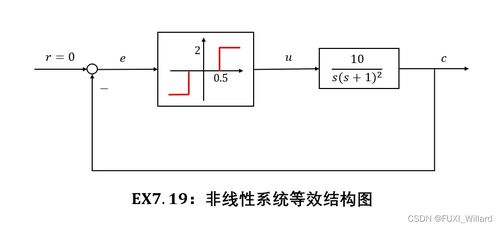
描述函数法:将非线性系统近似为线性系统,利用线性系统的分析方法研究非线性系统的动态行为。这种方法适用于具有饱和、死区等非线性特性的系统。
李雅普诺夫稳定性理论:利用李雅普诺夫函数研究非线性系统的稳定性。这种方法适用于具有复杂动态行为的系统。
数值分析方法:利用数值计算方法研究非线性系统的动态行为。这种方法适用于难以用解析方法求解的系统。
非线性控制系统的设计方法
非线性控制系统的设计方法主要包括以下几种:
反馈线性化:将非线性系统转化为线性系统,然后设计线性控制器。这种方法适用于具有可逆反馈线性化的系统。
滑模控制:利用滑模控制理论设计控制器,使系统状态在滑模面上运动。这种方法适用于具有饱和、死区等非线性特性的系统。
自适应控制:根据系统动态特性在线调整控制器参数,使系统达到期望性能。这种方法适用于具有时变、不确定性的系统。
鲁棒控制:设计控制器使系统在存在不确定性和外部干扰的情况下保持稳定。这种方法适用于具有不确定性和外部干扰的系统。
非线性控制系统在工程中的应用
非线性控制系统在工程中的应用非常广泛,以下列举几个典型应用:
航空航天领域:非线性控制系统在飞行器控制、卫星姿态控制等方面发挥着重要作用。
机器人技术:非线性控制系统在机器人路径规划、运动控制等方面具有广泛应用。
生物医学工程:非线性控制系统在心脏起搏器、人工关节等方面具有重要作用。
电力系统:非线性控制系统在电力系统稳定控制、故障诊断等方面具有广泛应用。
非线性控制系统在许多实际应用中具有重要意义。本文介绍了非线性控制系统的特点、建模方法、分析方法、设计方法以及在工程中的应用。随着科学技术的发展,非线性控制系统的研究将不断深入,为工程实践提供更多创新性的解决方案。



教程资讯
教程资讯排行