
惯导系统分为,惯导系统概述
时间:2024-12-23 来源:网络 人气:850
惯导系统概述
惯性导航系统(Inertial Navigation System,简称INS)是一种利用惯性原理进行导航的系统。它通过测量物体的加速度和角速度,结合初始位置信息,计算出物体的速度、姿态和位置。惯导系统具有自主性、隐蔽性和全天候等特点,广泛应用于航空航天、航海、军事、交通运输等领域。
惯导系统的分类

根据结构和工作原理,惯导系统可以分为以下几类:
平台式惯导系统:具有实体的物理平台,陀螺和加速度计置于平台上,平台跟踪导航坐标系,以实现速度和位置解算。
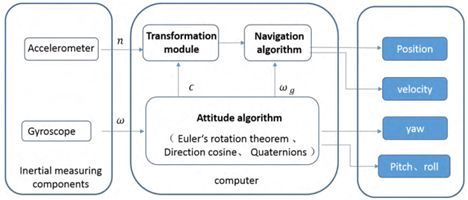
捷联式惯导系统:没有实体的物理平台,陀螺和加速度计直接固定在运动载体上,通过陀螺仪计算出一个虚拟的惯性平台,然后将加速度计测量结果旋转到这个虚拟平台上,再解算导航参数。
混合式惯导系统:结合了平台式和捷联式惯导系统的优点,既具有实体平台,又具有虚拟平台,以提高导航精度和可靠性。
平台式惯导系统

平台式惯导系统具有以下特点:
结构复杂,体积大,成本高。
仪表工作条件较好,原始测量值采集精确。
平台能直接建立导航坐标系,计算量小,容易补偿和修正仪表的输出。
可靠性较差。
捷联式惯导系统

捷联式惯导系统具有以下特点:
结构简单,体积小,维护方便。
陀螺仪和加速度计工作条件不佳,采集到的元器件原始测量值精度低。
加速度计输出的是载体坐标系的加速度分量,需要经计算机转换成导航坐标系的加速度分量,计算量较大,且容易产生导航解算的校正误差。
混合式惯导系统
混合式惯导系统结合了平台式和捷联式惯导系统的优点,具有以下特点:
具有较高的导航精度和可靠性。
结构相对简单,体积适中,成本较低。
具有较好的仪表工作条件,原始测量值采集精确。
惯导系统的应用
惯导系统在各个领域都有广泛的应用,以下列举几个典型应用场景:
航空航天:飞机、导弹、卫星等航天器的导航和制导。
航海:船舶、潜艇的导航和定位。
军事:无人机、导弹等军事装备的导航和制导。
交通运输:汽车、火车等交通工具的导航和定位。
其他领域:地震监测、地质勘探、机器人导航等。
惯导系统作为一种重要的导航技术,具有自主性、隐蔽性和全天候等特点,在各个领域都有广泛的应用。随着技术的不断发展,惯导系统的精度和可靠性将不断提高,应用领域也将进一步扩大。
相关推荐



教程资讯
教程资讯排行









