
惯性定位定向导航系统,技术原理与应用前景
时间:2024-12-17 来源:网络 人气:
惯性定位定向导航系统:技术原理与应用前景
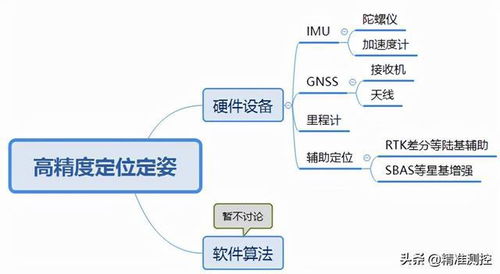
惯性导航系统的基本原理是利用物体惯性原理,通过测量物体的加速度和角速度,实现对物体位置、速度和姿态的实时计算。惯性导航系统主要由惯性测量单元(IMU)、信号预处理和机械力学编排三个模块组成。
惯性测量单元是系统的核心部件,它包括加速度计和陀螺仪。加速度计用于测量物体的加速度,陀螺仪用于测量物体的角速度。通过测量这些参数,系统能够计算出物体的位置、速度和姿态。
信号预处理部分负责对惯性测量单元输出的信号进行调理、误差补偿和检查输出量范围等,以确保惯性测量单元正常工作。
机械力学编排部分则根据惯性测量单元的输出数据,通过数学模型计算出物体的位置、速度和姿态。
军事领域:惯性导航系统在军事领域具有极高的应用价值。例如,在潜艇、舰艇、飞机等军事装备中,惯性导航系统可以提供自主导航能力,确保在复杂环境下仍能准确导航。
民用领域:在民用领域,惯性导航系统也得到了广泛应用。例如,在汽车导航、无人机、智能穿戴设备等领域,惯性导航系统可以提供实时、准确的定位和导航服务。
此外,惯性导航系统还在地质勘探、环境监测、灾害预警等领域发挥着重要作用。
以无人驾驶汽车为例,惯性导航系统可以与GPS等其他导航系统结合使用,提高导航的准确性和可靠性。在GPS信号不稳定或无法使用的区域,如隧道、地下停车场等,惯性导航系统可以独立工作,确保车辆在复杂环境中安全行驶。
在航空航天领域,惯性导航系统可以用于卫星、火箭等航天器的导航和姿态控制,提高航天任务的成功率。
高精度化:随着技术的不断发展,惯性导航系统的精度将越来越高。未来,惯性导航系统将能够提供厘米级甚至亚米级的定位精度。
多传感器融合:将惯性导航系统与其他导航技术,如GPS、GLONASS等卫星导航系统、激光雷达、视觉传感器等相结合,可以进一步提高导航的准确性和可靠性。
自主导航能力:未来的惯性导航系统将具备更强的自主导航能力,能够根据环境变化实时调整导航策略,提高航行的安全性和效率。
惯性定位定向导航系统作为一种重要的导航技术,在军事、民用等多个领域具有广泛的应用前景。随着技术的不断发展,惯性导航系统将更加精准、可靠,为人类生活带来更多便利。




教程资讯
教程资讯排行









