
非线性系统 状态空间,非线性系统状态空间建模与控制策略研究
时间:2024-12-15 来源:网络 人气:
非线性系统状态空间建模与控制策略研究

随着科学技术的不断发展,非线性系统在各个领域中的应用越来越广泛。非线性系统具有复杂性和不确定性,对其进行建模与控制是现代控制理论中的一个重要课题。本文将介绍非线性系统状态空间建模的基本方法,并探讨几种常见的非线性系统控制策略。
一、非线性系统状态空间建模
非线性系统状态空间建模是将非线性系统的动态行为转化为数学模型的过程。以下介绍几种常见的非线性系统状态空间建模方法:
1. 状态空间方程
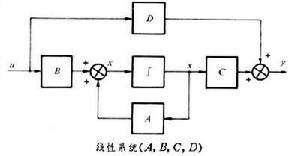
状态空间方程是一种描述系统动态行为的数学模型,通常表示为以下形式:
[ dot{x}(t) = f(x(t), u(t)) ]
[ y(t) = h(x(t), u(t)) ]
其中,( x(t) ) 是系统的状态向量,( u(t) ) 是系统的输入向量,( y(t) ) 是系统的输出向量,( f ) 和 ( h ) 是非线性函数。
2. 非线性微分方程
非线性微分方程是另一种描述非线性系统动态行为的数学模型,如以下形式:
[ dot{x}(t) = f(x(t)) ]
其中,( x(t) ) 是系统的状态变量,( f ) 是非线性函数。
3. 非线性差分方程
非线性差分方程是描述离散时间非线性系统动态行为的数学模型,如以下形式:
[ x_{n+1} = f(x_n) ]
其中,( x_n ) 是系统的状态变量,( f ) 是非线性函数。
二、非线性系统控制策略
非线性系统控制策略旨在设计控制器,使系统在给定输入下达到期望的动态行为。以下介绍几种常见的非线性系统控制策略:
1. 反馈线性化
反馈线性化是一种将非线性系统转化为线性系统的控制方法。其基本思想是通过设计适当的反馈控制器,消除系统中的非线性项,从而将非线性系统转化为线性系统。反馈线性化方法适用于具有可逆非线性的系统。
2. 鲁棒控制
鲁棒控制是一种针对不确定性和外部扰动的控制方法。其基本思想是设计控制器,使系统在存在不确定性和外部扰动的情况下,仍能保持稳定的动态行为。鲁棒控制方法适用于具有不确定性和外部扰动的系统。
3. 模型预测控制
模型预测控制是一种基于系统模型的控制方法。其基本思想是利用系统模型预测系统未来的动态行为,并设计控制器使系统在预测的动态行为下达到期望的输出。模型预测控制方法适用于具有复杂动态行为的系统。
4. 混合控制
混合控制是一种结合多种控制策略的控制方法。其基本思想是根据系统的不同工作状态,选择合适的控制策略进行控制。混合控制方法适用于具有多种工作状态的系统。
非线性系统状态空间建模与控制策略研究是现代控制理论中的一个重要课题。本文介绍了非线性系统状态空间建模的基本方法,并探讨了几种常见的非线性系统控制策略。随着非线性系统在各个领域的应用越来越广泛,非线性系统建模与控制策略的研究将具有更加重要的意义。




教程资讯
教程资讯排行









