
风力摆控制系统设计,风力摆控制系统设计概述
时间:2024-12-14 来源:网络 人气:
风力摆控制系统设计概述
随着能源需求的不断增长和环境保护意识的提高,风力发电作为一种清洁、可再生的能源形式,受到了广泛关注。风力摆控制系统作为风力发电系统的重要组成部分,其设计对于提高发电效率和系统稳定性具有重要意义。本文将详细介绍风力摆控制系统的设计过程,包括系统方案、理论分析、电路设计、程序设计以及测试方案等内容。
系统方案设计
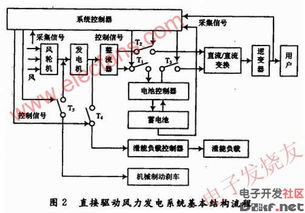
风力摆控制系统主要由以下几部分组成:控制中心、传感器、执行器、电源以及通信模块。
控制中心:采用STM32F103V单片机作为主控芯片,负责接收传感器数据、执行控制算法、输出控制信号等。
传感器:包括加速度计模块MPU6050和指南针模块GY-273,用于检测摆杆的位置和方向。
执行器:由直流风机(无刷电机扇叶)组成,用于产生大小不同的力,驱动摆杆运动。
电源:为控制系统提供稳定的电源供应。
通信模块:用于与其他系统或设备进行数据交换。
系统理论分析与计算
风力摆控制系统主要涉及以下理论分析:
风力摆位置的计算与分析:根据传感器数据,利用三角函数公式计算出摆杆现在距离中心的具体位置(方向、距离)。
控制算法的分析:采用PID算法进行控制,比例环节进行快速响应,积分环节实现无静差,微分环节减小超调,加快动态响应。
电路设计
风力摆控制系统的电路设计主要包括以下部分:
风力摆控制系统总电路原理图:展示整个系统的电路连接关系。
部分电路详细原理图:展示关键电路模块的详细设计。
电源:为控制系统提供稳定的电源供应,包括电源模块、滤波电路等。
程序设计
风力摆控制系统的程序设计主要包括以下内容:
程序功能描述与设计思路:详细描述程序的功能和设计思路。
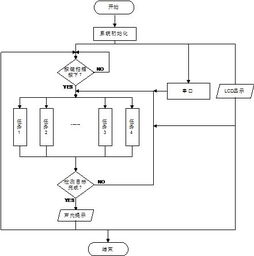
程序流程图:展示程序的主要执行流程。
控制算法实现:实现PID算法,对摆杆进行精确控制。
测试方案与测试结果
风力摆控制系统的测试方案主要包括以下内容:
测试方案:制定详细的测试计划,包括测试环境、测试设备、测试步骤等。
测试条件与仪器:明确测试所需的条件和仪器。
测试结果及分析:对测试结果进行分析,评估系统的性能和稳定性。
结论与心得
风力摆控制系统设计是一项复杂而重要的工作,需要综合考虑系统性能、稳定性、可靠性等因素。本文详细介绍了风力摆控制系统的设计过程,包括系统方案、理论分析、电路设计、程序设计以及测试方案等内容。通过实际测试,验证了该系统的性能和稳定性,为风力发电系统的优化提供了有益的参考。
关键词
风力摆控制系统;STM32F103V;PID算法;加速度计;指南针




教程资讯
教程资讯排行









