
非线性系统实验,探索复杂动态行为的奥秘
时间:2024-12-07 来源:网络 人气:
非线性系统实验:探索复杂动态行为的奥秘
非线性系统在自然界和工程领域中广泛存在,其复杂动态行为一直是科学研究的热点。为了深入理解非线性系统的特性,本文将介绍一项非线性系统实验,旨在通过实际操作和数据分析,揭示非线性系统的内在规律。
一、实验背景与目的
非线性系统具有高阶非线性、不稳定性和强耦合特性,这使得其动态行为复杂多变。本实验旨在通过搭建非线性系统模型,运用现代控制理论方法,对非线性系统进行仿真和分析,从而加深对非线性系统特性的理解。
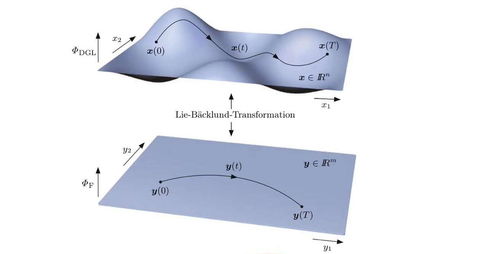
二、实验原理与模型

本实验采用一维直线倒立摆系统作为研究对象。该系统由可沿直线轨道移动的小车和通过铰链连接的摆杆组成,具有典型的高阶非线性、不稳定性和强耦合特性。实验中,我们将采用PID控制方法对倒立摆系统进行控制,以实现摆杆的稳定平衡。
三、实验步骤与操作

1. 搭建实验平台:根据实验要求,搭建直线倒立摆实验平台,包括小车、摆杆、传感器、控制器等设备。
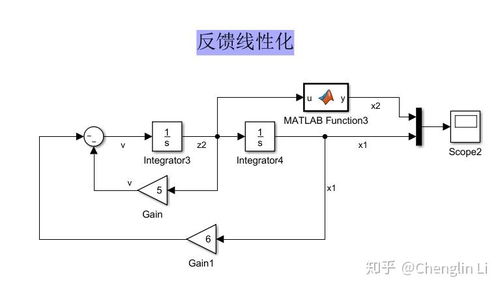
2. 系统建模:利用MATLAB软件对直线倒立摆系统进行建模,包括建立数学模型和仿真模型。
3. PID控制器设计:根据系统特性,设计合适的PID控制器参数,实现对倒立摆系统的稳定控制。
4. 仿真实验:在MATLAB/Simulink环境下,对倒立摆系统进行仿真实验,观察系统动态行为。
5. 实验数据分析:对实验数据进行处理和分析,验证PID控制器的有效性,并探讨非线性系统特性。
四、实验结果与分析
1. 仿真结果:通过仿真实验,观察到倒立摆系统在PID控制下的动态行为。结果表明,在合适的PID控制器参数下,倒立摆系统可以稳定平衡。
2. 实验数据分析:对实验数据进行处理和分析,发现以下规律:
(1)非线性系统具有丰富的动态行为,如混沌、分岔等。
(2)PID控制器参数对系统稳定性有显著影响。
(3)非线性系统在特定条件下可能发生混沌现象。
五、结论与展望
本实验通过对直线倒立摆系统的仿真和分析,揭示了非线性系统的复杂动态行为。实验结果表明,PID控制器可以有效控制非线性系统,实现稳定平衡。非线性系统的研究仍存在许多挑战,如混沌控制、鲁棒控制等。未来,我们将进一步研究非线性系统控制方法,为实际工程应用提供理论支持。




教程资讯
教程资讯排行









