
惯性导航系统,惯性导航系统概述
时间:2024-11-28 来源:网络 人气:
惯性导航系统概述
惯性导航系统(Inertial Navigation System,简称INS)是一种利用惯性原理进行导航定位的技术。它通过测量载体(如飞机、舰船、潜艇、无人机等)的加速度和角速度,结合初始位置和姿态信息,实时计算载体的位置、速度和姿态。惯性导航系统具有自主性强、抗干扰能力强、隐蔽性好等优点,在军事、民用等领域都有广泛应用。
惯性导航系统的工作原理
惯性导航系统的工作原理基于牛顿第一定律,即物体在没有外力作用下,将保持静止或匀速直线运动状态。惯性导航系统通过以下步骤实现导航定位:
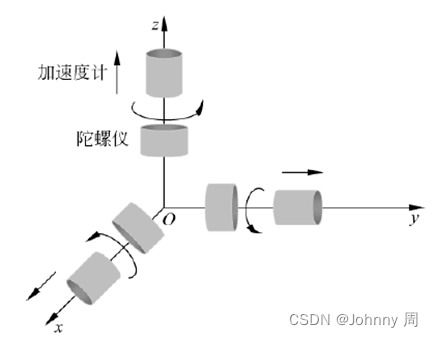
测量载体加速度和角速度:惯性导航系统中的惯性测量单元(Inertial Measurement Unit,简称IMU)负责测量载体的加速度和角速度。IMU通常由加速度计、陀螺仪和磁力计组成。
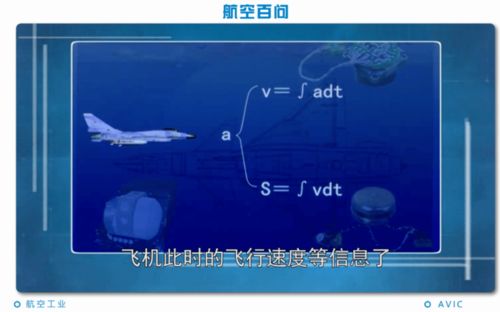
计算速度和位置:根据加速度和角速度的积分,可以计算出载体的速度和位置。速度是加速度对时间的积分,位置是速度对时间的积分。
更新姿态信息:通过角速度的积分,可以计算出载体的姿态信息,如偏航角、俯仰角和滚转角。
实时输出导航信息:惯性导航系统将计算出的位置、速度和姿态信息实时输出,供用户使用。
惯性导航系统的组成
惯性导航系统主要由以下几部分组成:
惯性测量单元(IMU):负责测量载体的加速度和角速度。
计算机:负责处理IMU采集的数据,进行导航计算。
传感器:如GPS、磁力计等,用于辅助导航,提高导航精度。
输出设备:如显示屏、打印机等,用于输出导航信息。
惯性导航系统的优点
惯性导航系统具有以下优点:
自主性强:惯性导航系统不依赖于外部信号,可以在无信号环境中工作。
抗干扰能力强:惯性导航系统不受电磁干扰、信号遮挡等因素的影响。
隐蔽性好:惯性导航系统不向外辐射能量,不易被敌方发现。
实时性好:惯性导航系统可以实时输出导航信息,满足实时导航需求。
惯性导航系统的应用
惯性导航系统在军事和民用领域都有广泛应用,主要包括:
军事领域:导弹制导、舰船导航、潜艇导航、无人机导航等。
民用领域:航空、航海、航天、测绘、地质勘探、交通运输等。
惯性导航系统的挑战与发展趋势

尽管惯性导航系统具有诸多优点,但在实际应用中仍面临一些挑战,如:
误差累积:惯性导航系统在长时间运行过程中,由于加速度计和陀螺仪的误差累积,会导致导航精度下降。
成本较高:惯性导航系统的研发和生产成本较高,限制了其广泛应用。
为了解决这些问题,惯性导航系统的发展趋势主要包括:
提高精度:通过采用高精度加速度计和陀螺仪、优化算法等手段,提高惯性导航系统的精度。
降低成本:通过技术创新、批量生产等手段,降低惯性导航系统的成本。
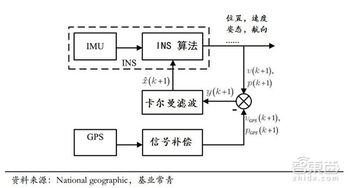
与其他导航系统融合:将惯性导航系统与其他导航系统(如GPS、GLONASS等)进行融合,提高导航精度和可靠性。
惯性导航系统作为一种重要的导航定位技术,在军事和民用领域具有广泛的应用前景。随着技术的不断发展,惯性导航系统将更加精确、可靠、经济,为人类的生产和生活带来更多便利。




教程资讯
教程资讯排行









