非线性控制系统,非线性控制系统的概述
时间:2024-11-26 来源:网络 人气:
非线性控制系统的概述

非线性控制系统是指系统中的数学模型包含非线性项的控制系统。与线性控制系统相比,非线性控制系统具有更复杂的动态特性,其行为可能难以预测。非线性控制系统在许多实际应用中具有重要意义,如航空航天、机器人、汽车等。本文将介绍非线性控制系统的基本概念、特点以及常见控制方法。
非线性控制系统的特点
非线性控制系统的特点主要体现在以下几个方面:
动态特性复杂:非线性系统的动态行为可能非常复杂,难以用简单的数学模型描述。
稳定性难以保证:非线性系统的稳定性分析比线性系统更为困难,需要采用特殊的分析方法。
鲁棒性较差:非线性系统对参数变化和外部干扰的敏感度较高,鲁棒性较差。
控制方法多样:针对不同的非线性控制系统,可以采用多种控制方法,如反馈线性化、滑模控制、自适应控制等。
非线性控制系统的建模
非线性控制系统的建模是研究非线性控制系统的基础。常见的建模方法包括以下几种:
基于物理原理的建模:根据系统的物理原理,建立系统的数学模型。
基于实验数据的建模:通过实验获取系统数据,利用数据驱动方法建立数学模型。
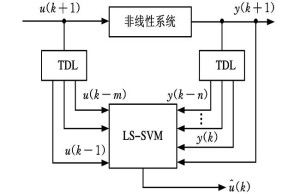
基于神经网络建模:利用神经网络强大的非线性映射能力,建立非线性系统的数学模型。
非线性控制系统的稳定性分析
非线性控制系统的稳定性分析是研究非线性控制系统性能的关键。常见的稳定性分析方法包括以下几种:
李雅普诺夫稳定性理论:通过构造李雅普诺夫函数,分析系统的稳定性。
李雅普诺夫指数:利用李雅普诺夫指数判断系统的稳定性。
线性化方法:将非线性系统在平衡点附近线性化,分析线性化系统的稳定性。
非线性控制系统的控制方法
针对非线性控制系统,常见的控制方法包括以下几种:
反馈线性化:将非线性系统转化为线性系统,然后采用线性控制方法进行控制。
滑模控制:通过设计滑模面,使系统状态沿着滑模面运动,从而实现控制目标。
自适应控制:根据系统动态特性,实时调整控制器参数,以适应系统变化。
鲁棒控制:设计控制器,使系统对参数变化和外部干扰具有鲁棒性。
非线性控制系统的应用
非线性控制系统在许多领域都有广泛的应用,以下列举几个典型应用:
航空航天:如飞行器姿态控制、卫星轨道控制等。
机器人:如机器人路径规划、机器人关节控制等。
汽车:如汽车稳定性控制、自适应巡航控制等。
电力系统:如电力系统稳定控制、分布式发电控制等。
非线性控制系统在许多实际应用中具有重要意义。本文介绍了非线性控制系统的基本概念、特点、建模方法、稳定性分析以及常见控制方法。随着控制理论和技术的发展,非线性控制系统将在更多领域发挥重要作用。
相关推荐




教程资讯
教程资讯排行