惯性导航系统的工作原理,惯性导航系统简介
时间:2024-11-26 来源:网络 人气:
惯性导航系统简介
惯性导航系统(Inertial Navigation System,简称INS)是一种利用惯性原理进行导航的系统。它不依赖于外部信号,能够自主地提供导航信息,如速度、位置和姿态。惯性导航系统广泛应用于军事、航空航天、航海和民用领域。
惯性导航系统的工作原理
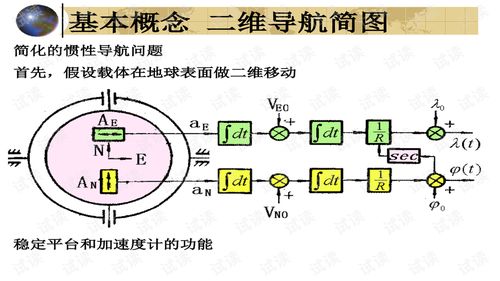
惯性导航系统的工作原理基于牛顿第一定律,即物体在没有外力作用下,将保持静止状态或匀速直线运动。惯性导航系统通过测量载体(如飞机、舰船或无人机)的加速度和角速度,来计算其速度、位置和姿态。
核心组件
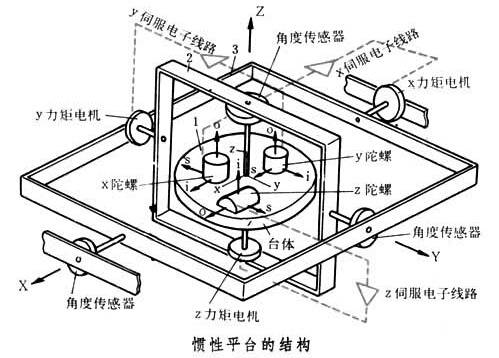
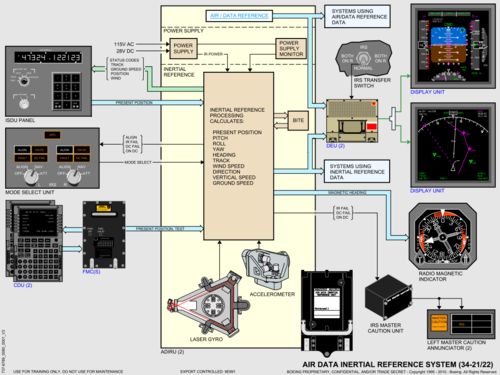
惯性导航系统的核心组件包括惯性测量单元(Inertial Measurement Unit,简称IMU)和导航计算机。
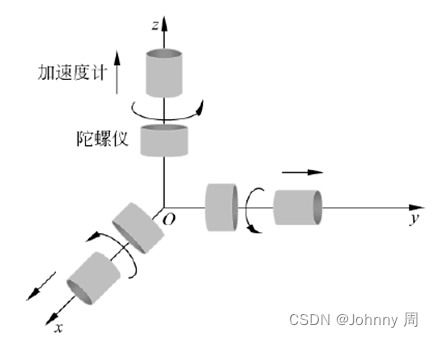
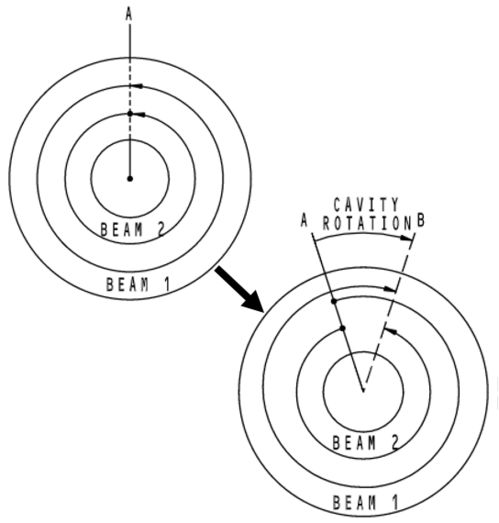
惯性测量单元:IMU是惯性导航系统的“感官”,主要由加速度计和陀螺仪组成。加速度计用于测量载体的加速度,陀螺仪用于测量载体的角速度。
导航计算机:导航计算机是惯性导航系统的“大脑”,负责处理IMU收集的数据,并计算出载体的速度、位置和姿态。
数据采集与处理
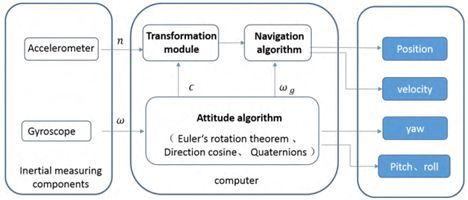
惯性导航系统的工作流程如下:
IMU采集加速度和角速度数据。
导航计算机对采集到的数据进行滤波和补偿,以消除噪声和误差。
导航计算机根据加速度和角速度数据,计算载体的速度、位置和姿态。
导航计算机将计算结果输出给用户或控制系统。
误差分析
惯性导航系统在长时间运行过程中,由于加速度计和陀螺仪的误差、地球自转等因素,会导致位置和速度的累积误差。为了减小误差,惯性导航系统通常采用以下方法:
误差补偿:通过算法对IMU数据进行补偿,减小误差。
辅助导航系统:结合其他导航系统(如GPS、GLONASS等)的数据,提高导航精度。
系统校准:定期对IMU进行校准,减小误差。
应用领域
惯性导航系统在以下领域具有广泛的应用:
军事领域:用于导弹、卫星、舰船和飞机的导航和制导。
航空航天领域:用于飞机、卫星和无人机的导航和姿态控制。
航海领域:用于舰船的导航和姿态控制。
民用领域:用于无人机、自动驾驶汽车等。
惯性导航系统是一种基于惯性原理的自主式导航系统,具有不依赖于外部信号、抗干扰能力强等优点。随着技术的不断发展,惯性导航系统在各个领域的应用将越来越广泛。
相关推荐




教程资讯
教程资讯排行