
ahrs航姿参考系统,飞行器的“眼睛”与“大脑”
时间:2024-11-22 来源:网络 人气:
AHRS航姿参考系统:飞行器的“眼睛”与“大脑”
随着无人机、无人船、卫星等高科技设备的广泛应用,航姿参考系统(Attitude and Heading Reference System,简称AHRS)作为这些设备的关键组成部分,其重要性日益凸显。本文将深入探讨AHRS的工作原理、应用领域以及未来发展趋势。
一、AHRS的定义与组成
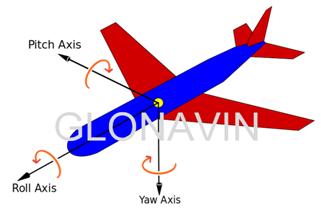
AHRS,即航姿参考系统,是一种能够为飞行器提供航向、横滚和俯仰等姿态信息的系统。它主要由加速度计、陀螺仪和磁力计等传感器组成,通过这些传感器获取飞行器的运动状态,进而计算出飞行器的姿态。
二、AHRS的工作原理
AHRS的工作原理可以概括为以下三个步骤:
传感器采集:加速度计、陀螺仪和磁力计等传感器实时采集飞行器的运动数据。
数据处理:将采集到的数据进行滤波、积分等处理,得到飞行器的姿态信息。
输出结果:将计算出的姿态信息输出给飞行器控制系统,实现飞行器的稳定飞行。
三、AHRS的应用领域

AHRS在各个领域都有广泛的应用,以下列举几个典型应用场景:
无人机:AHRS为无人机提供稳定的姿态信息,使其在复杂环境中实现自主飞行。
卫星:AHRS为卫星提供姿态信息,确保卫星在轨道上稳定运行。
船舶:AHRS为船舶提供航向、横滚和俯仰等姿态信息,提高船舶的航行精度。
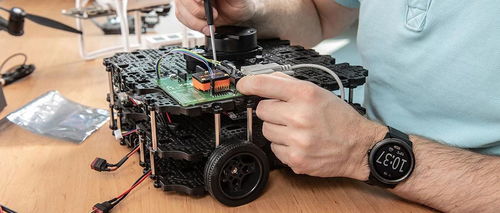
机器人:AHRS为机器人提供姿态信息,使其在执行任务时保持稳定。
四、AHRS的未来发展趋势
高精度:随着传感器技术的进步,AHRS的精度将不断提高,满足更高要求的导航需求。
小型化:随着MEMS技术的应用,AHRS将更加小型化,便于集成到各种设备中。
智能化:结合人工智能技术,AHRS将具备更强的数据处理能力和自适应能力。
多功能化:AHRS将与其他传感器结合,实现更多功能,如导航、定位、避障等。
作者 小编




教程资讯
教程资讯排行









