fanuc系统变量,编程与维护的关键
时间:2024-11-20 来源:网络 人气:
深入了解Fanuc系统变量:编程与维护的关键
Fanuc系统变量是机器人编程和维护过程中的重要组成部分。本文将详细介绍Fanuc系统变量的概念、分类、应用以及注意事项,帮助读者更好地理解和运用这些变量。
Fanuc系统变量是指在Fanuc机器人系统中,用于存储和传递信息的变量。这些变量可以是数字、字符串或布尔值,它们在机器人编程和操作中扮演着至关重要的角色。
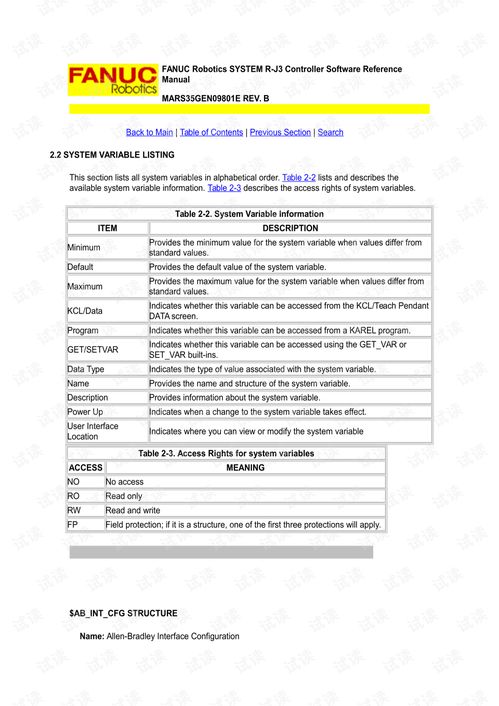
Fanuc系统变量可以分为以下几类:
基本变量:用于存储基本的数据,如位置、速度、时间等。
系统变量:由Fanuc系统内部定义,用于控制机器人的各种功能。
用户变量:由用户自定义,用于存储和传递用户特定的数据。
宏变量:用于存储宏程序中的数据,如循环次数、条件判断等。
位置控制:通过系统变量存储和传递机器人的位置信息,实现精确的位置控制。
速度控制:通过系统变量设置机器人的速度参数,实现不同速度下的运动控制。
时间控制:通过系统变量记录和计算时间,实现定时任务和动作控制。
条件判断:通过系统变量存储条件值,实现逻辑判断和分支控制。
系统变量100:当前程序号
系统变量101:当前刀具号
系统变量3001:计时器单位(毫秒)
系统变量3012:机台时间
系统变量5021:当前机械坐标x值
系统变量5022:当前机械坐标y值
系统变量5023:当前机械坐标z值
在使用Fanuc系统变量时,需要注意以下几点:
变量命名规范:变量命名应遵循一定的规范,以便于阅读和维护。
变量类型选择:根据实际需求选择合适的变量类型,避免不必要的错误。
变量值范围:注意变量值的范围限制,避免超出范围导致程序错误。
变量引用:正确引用变量,避免因引用错误导致程序运行异常。
Fanuc系统变量是机器人编程和维护的重要工具,掌握这些变量的使用方法对于提高编程效率和机器人性能至关重要。本文对Fanuc系统变量的概念、分类、应用和注意事项进行了详细介绍,希望对读者有所帮助。



教程资讯
教程资讯排行