
agv运动控制系统,AGV运动控制系统的设计与实现
时间:2024-11-18 来源:网络 人气:
AGV运动控制系统的设计与实现
随着工业自动化程度的不断提高,自动引导车(AGV)作为一种重要的物流搬运设备,在制造业中得到了广泛应用。AGV运动控制系统作为AGV的核心技术,其设计与实现直接影响到AGV的运行效率和稳定性。本文将详细介绍AGV运动控制系统的设计与实现过程。
一、AGV运动控制系统的概述
AGV运动控制系统主要包括以下几个部分:传感器系统、控制器、执行器、通信系统等。传感器系统负责采集AGV周围环境信息,控制器根据传感器信息进行决策,执行器负责执行控制指令,通信系统负责AGV与上位机或其他AGV之间的信息交换。
二、AGV运动控制系统的设计

1. 传感器系统设计
传感器系统是AGV运动控制系统的“眼睛”,主要负责采集AGV周围环境信息。常见的传感器有激光测距传感器、红外传感器、超声波传感器等。在设计传感器系统时,需要考虑以下因素:
传感器的精度和可靠性
传感器的安装位置和角度
传感器的抗干扰能力
2. 控制器设计
控制器是AGV运动控制系统的“大脑”,主要负责根据传感器信息进行决策。常见的控制器有PLC、单片机、嵌入式系统等。在设计控制器时,需要考虑以下因素:
控制算法的选择
控制器的处理能力
控制器的实时性
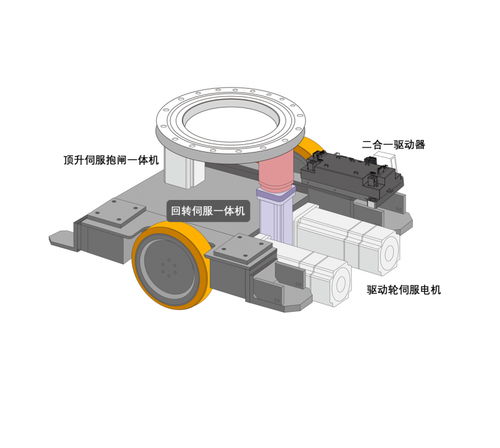
3. 执行器设计
执行器是AGV运动控制系统的“手脚”,主要负责执行控制指令。常见的执行器有电机、伺服电机、步进电机等。在设计执行器时,需要考虑以下因素:
执行器的功率和速度
执行器的响应时间
执行器的控制精度
4. 通信系统设计
通信系统是AGV运动控制系统的“神经”,主要负责AGV与上位机或其他AGV之间的信息交换。常见的通信方式有CAN总线、以太网、无线通信等。在设计通信系统时,需要考虑以下因素:
通信速率和带宽
通信的可靠性
通信的实时性
三、AGV运动控制系统的实现

1. 传感器系统实现
根据设计要求,选择合适的传感器,并对其进行安装和调试。例如,使用激光测距传感器进行路径跟踪,使用红外传感器进行障碍物检测等。
2. 控制器实现
根据设计要求,选择合适的控制器,并编写相应的控制程序。例如,使用PLC进行路径规划,使用单片机进行电机控制等。
3. 执行器实现
根据设计要求,选择合适的执行器,并对其进行安装和调试。例如,使用伺服电机进行精确位置控制,使用步进电机进行速度控制等。
4. 通信系统实现
根据设计要求,选择合适的通信方式,并对其进行安装和调试。例如,使用CAN总线进行AGV与上位机之间的通信,使用无线通信进行AGV之间的通信等。
AGV运动控制系统的设计与实现是AGV应用的关键技术。本文从传感器系统、控制器、执行器、通信系统等方面对AGV运动控制系统进行了详细阐述,为AGV运动控制系统的设计与实现提供了参考。




教程资讯
教程资讯排行









