
can 系统,构建高效、可靠的通信桥梁
时间:2024-11-16 来源:网络 人气:
深入解析CAN系统:构建高效、可靠的通信桥梁
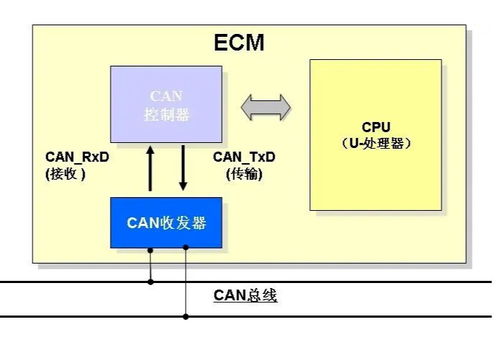
在当今的工业自动化和汽车电子领域,CAN(Controller Area Network)系统已成为不可或缺的通信协议。它以其高可靠性、实时性和灵活性,广泛应用于各种复杂系统中。本文将深入解析CAN系统的工作原理、配置方法以及在实际应用中的注意事项,旨在为开发者提供全面的技术指导。
一、CAN系统概述
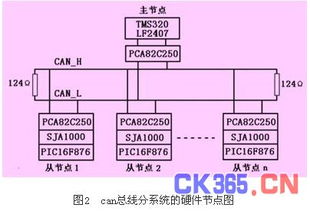
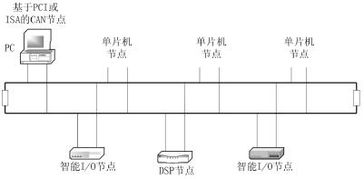
CAN系统是一种多主从的串行通信总线,允许多个设备在同一网络中独立地发送和接收数据。其核心特点包括:
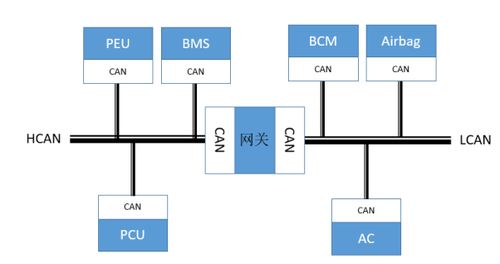
- 多主从结构:任何节点都可以主动发送数据,无需中央控制器。
- 高可靠性:采用错误检测和仲裁机制,确保数据传输的准确性。
- 实时性:支持高速数据传输,满足实时控制需求。
二、CAN系统工作原理

CAN系统的工作原理基于以下步骤:
1. 数据帧发送:发送节点将数据封装成CAN数据帧,包括标识符、数据、校验和等。
2. 仲裁过程:多个节点同时发送数据时,通过仲裁机制确定优先级。
3. 数据接收:接收节点对接收到的数据帧进行解析,提取所需信息。
4. 错误处理:系统具备错误检测和恢复机制,确保通信的可靠性。
三、STM32 CAN通信配置
STM32微控制器因其强大的性能和丰富的外设支持,成为CAN通信开发的理想选择。以下为STM32 CAN通信配置步骤:
1. 使用STM32 cubeMX:通过图形化界面配置CAN外设,包括波特率、滤波器等。
2. HAL库编程:使用STM32 HAL库编写CAN中断服务程序,实现数据的接收和发送。
3. 示例工程:参考STM32 cubeMX CAN中断方式接收发送数据项目,学习实际应用。
四、STM32 CAN波特率计算
STM32 CAN波特率计算是配置CAN通信的关键步骤。以下为计算方法:
1. 系统时钟频率:确定STM32微控制器的系统时钟频率。
2. 预分频器值:根据波特率要求选择合适的预分频器值。
3. 波特率计算:使用STM32 CAN波特率计算器工具,自动计算波特率设置。
五、STM32 CAN波特率配置表
STM32 CAN波特率配置表提供了常用波特率配置时,各个参数的具体取值,方便开发者快速、准确地配置STM32的CAN通信参数。
CAN系统作为一种高效、可靠的通信协议,在工业自动化和汽车电子领域具有广泛的应用。通过本文的解析,开发者可以更好地理解CAN系统的工作原理、配置方法以及在实际应用中的注意事项,为构建高效、可靠的通信桥梁提供有力支持。
作者 小编
相关推荐




教程资讯
教程资讯排行









