
abb机器人系统信号,配置、使用与关联
时间:2024-10-31 来源:网络 人气:
ABB机器人系统信号详解:配置、使用与关联

随着工业自动化技术的不断发展,ABB机器人凭借其卓越的性能和可靠性,在全球范围内得到了广泛应用。在ABB机器人系统中,系统信号扮演着至关重要的角色,它们是机器人与外部设备、控制系统之间进行信息交互的桥梁。本文将详细介绍ABB机器人系统信号的配置、使用以及关联方法。
一、ABB机器人系统信号概述
ABB机器人系统信号主要包括数字量输入输出(DIDO)、数字量组输入输出(GIGO)、模拟量输入输出(GIGO)等类型。这些信号用于实现机器人与外部设备、控制系统之间的数据交换,如启动、停止、报警、位置反馈等。
二、ABB机器人系统信号配置
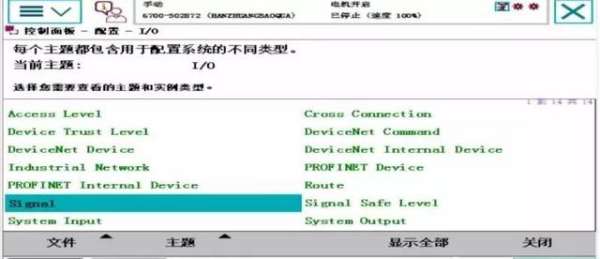
1. 进入ABB机器人示教器,选择“控制面板”。
2. 在“控制面板”中,选择“配置”。
3. 在“配置”菜单下,选择“系统参数”。
4. 在“系统参数”中,选择“信号”。
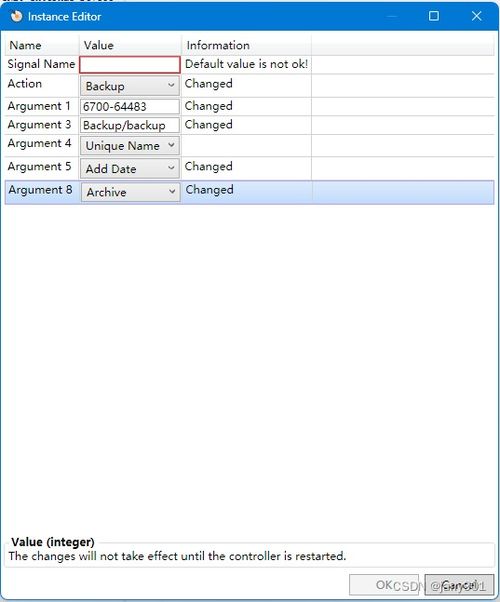
5. 在“信号”页面,可以创建、编辑和删除信号。
6. 创建信号时,需要填写信号名称、类型、所属模块和地址等信息。
三、ABB机器人系统信号使用
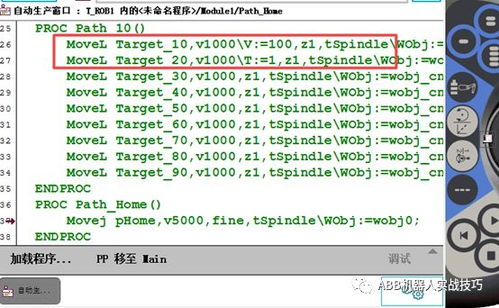
1. 在ABB机器人程序中,可以使用系统信号进行控制。
2. 例如,可以使用数字量输出信号控制外部设备,如启动电机、关闭设备等。
3. 使用系统信号时,需要根据实际需求选择合适的信号类型和地址。
四、ABB机器人系统信号关联
1. 在ABB机器人示教器中,选择“控制面板”。
2. 在“控制面板”中,选择“配置”。
3. 在“配置”菜单下,选择“交叉连接”。
4. 在“交叉连接”页面,可以创建、编辑和删除信号关联。
5. 创建信号关联时,需要填写关联信号名称、结果、条件等信息。
ABB机器人系统信号在工业自动化领域发挥着重要作用。通过本文的介绍,相信读者对ABB机器人系统信号的配置、使用和关联方法有了更深入的了解。在实际应用中,合理配置和使用系统信号,可以提高机器人系统的稳定性和可靠性,为工业生产带来更多便利。
作者 小编




教程资讯
教程资讯排行









