
agv系统组成,AGV系统组成详解
时间:2024-10-30 来源:网络 人气:
AGV系统组成详解

随着工业自动化和物流行业的快速发展,自动引导车(AGV)系统因其高效、灵活、智能的特点,被广泛应用于生产制造、仓储物流等领域。本文将详细介绍AGV系统的组成部分,帮助读者全面了解这一先进技术。
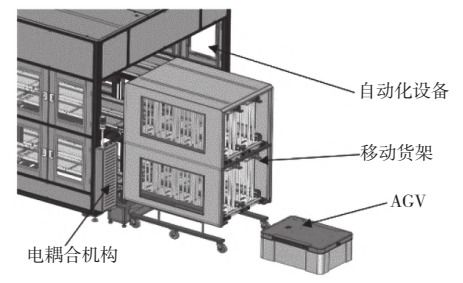
一、车体结构

AGV系统的车体结构是其基础部分,主要由以下几部分组成:
车架:车架是AGV系统的骨架,通常由钢构件焊接而成,要求具备足够的强度和刚度,以保证车体在运行和加速时的稳定性。
驱动装置:驱动装置是AGV系统的主要动力来源,通常采用交流伺服电机或直流电机,保证车辆的运动响应快、启停平稳。
转向装置:转向装置负责AGV系统的转向,通常采用液压或电动转向系统,实现精确的转向控制。
精确停车装置:精确停车装置确保AGV系统在到达指定位置时能够准确停车,提高作业效率。
车上控制器:车上控制器负责接收地面控制系统的指令,控制AGV系统的运行、转向、停车等操作。
通信装置:通信装置负责AGV系统与地面控制系统之间的数据传输,实现实时监控和指令下达。
信息采样子系统:信息采样子系统负责采集AGV系统的运行状态、环境信息等,为地面控制系统提供数据支持。
移载装置:移载装置负责AGV系统与货物之间的装卸操作,提高作业效率。
车体方位计算子系统:车体方位计算子系统负责计算AGV系统的位置、航向等信息,为导航系统提供数据支持。
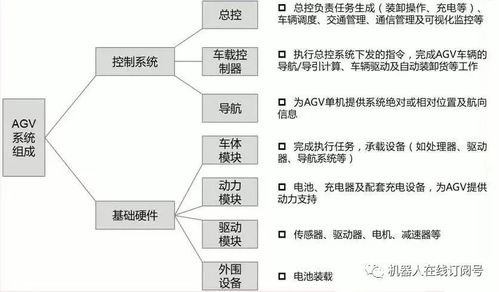
二、控制系统

AGV系统的控制系统是其核心部分,主要包括以下几部分:
地面控制系统:地面控制系统负责AGV系统的任务分配、车辆调度、路径管理、交通管理、自动充电等功能。
车载控制系统:车载控制系统负责接收地面控制系统的指令,实现AGV系统的导航计算、导引实现、车辆行走、装卸操作等功能。
导航/导引系统:导航/导引系统为AGV单机提供系统绝对或相对位置及航向,实现精确的路径规划。
三、导引系统
导引系统是AGV系统的重要组成部分,负责AGV系统的路径规划和导航。常见的导引系统包括以下几种:
电磁感应导引:通过铺设在地面上的电磁感应轨道,实现AGV系统的路径规划和导航。
激光导航:利用激光扫描地面,实现AGV系统的路径规划和导航。
图像识别导引:通过摄像头捕捉地面上的图像,实现AGV系统的路径规划和导航。
四、避障系统
避障系统是AGV系统的重要组成部分,负责AGV系统在运行过程中避免碰撞。常见的避障系统包括以下几种:
激光避障:利用激光传感器检测周围环境,实现AGV系统的避障。
光电避障:利用光电传感器检测周围环境,实现AGV系统的避障。
红外避障:利用红外传感器检测周围环境,实现AGV系统的避障。
超声避障:利用超声传感器检测周围环境,实现AGV系统的避障。
机械碰撞感应传感器:检测AGV系统与周围物体的碰撞,实现避障。
五、监控系统
监控系统是AGV系统的重要组成部分,负责实时监控AGV系统的运行状态,包括速度、方向、定位、电量等。常见的监控系统包括以下几部分:
感知层:包括GPS定位器、摄像头、PLC等设备,负责采集AGV小车的运行状态、环境信息等。
相关推荐




教程资讯
教程资讯排行



![学 [][][] 代表](/uploads/allimg/20260116/10-260116202601202.jpg)





