
2阶系统,什么是2阶系统?
时间:2024-10-29 来源:网络 人气:
什么是2阶系统?
在控制理论中,2阶系统是指具有两个独立能控或能观状态变量的线性时不变系统。这类系统在工程实践中非常常见,如电机控制、伺服系统等。2阶系统的特点是具有两个自由度,可以通过调整系统的参数来控制系统的动态响应。
2阶系统的数学模型
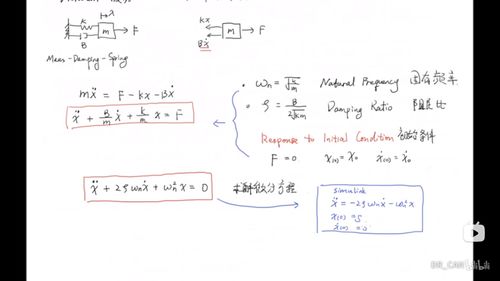
2阶系统的数学模型通常用二阶常系数线性微分方程来描述。一个典型的2阶系统可以表示为以下形式:
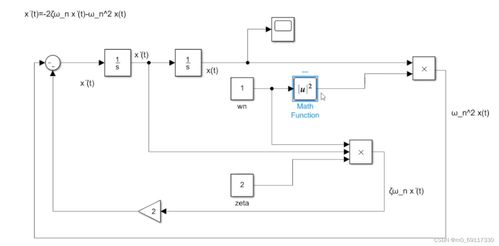
[ ddot{x}(t) + 2zetaomega_ndot{x}(t) + omega_n^2x(t) = u(t) ]
其中,( x(t) ) 是系统的输出,( u(t) ) 是输入,( omega_n ) 是系统的自然频率,( zeta ) 是阻尼比。这个方程的解可以描述系统的动态行为,包括上升时间、超调量、稳态误差等性能指标。
2阶系统的性能指标
2阶系统的性能指标主要包括以下几种:
上升时间(( t_r )):系统从稳态值的10%上升到稳态值的90%所需的时间。
超调量(( M )):系统响应达到稳态值时的最大偏差与稳态值之比,通常用百分比表示。
稳态误差(( e_{ss} )):系统在稳态时输出与期望输出之间的误差。
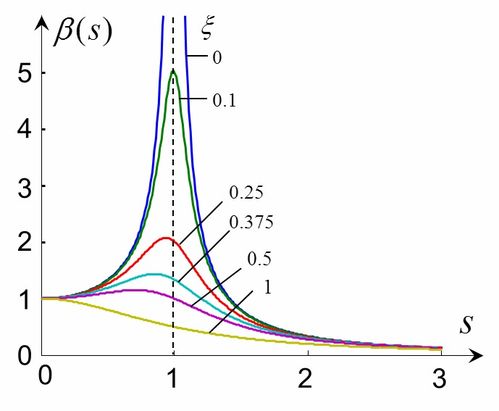
阻尼比(( zeta )):系统阻尼程度的一个无量纲参数,反映了系统响应的振荡程度。
自然频率(( omega_n )):系统在没有阻尼时振荡的频率。
2阶系统的稳定性分析
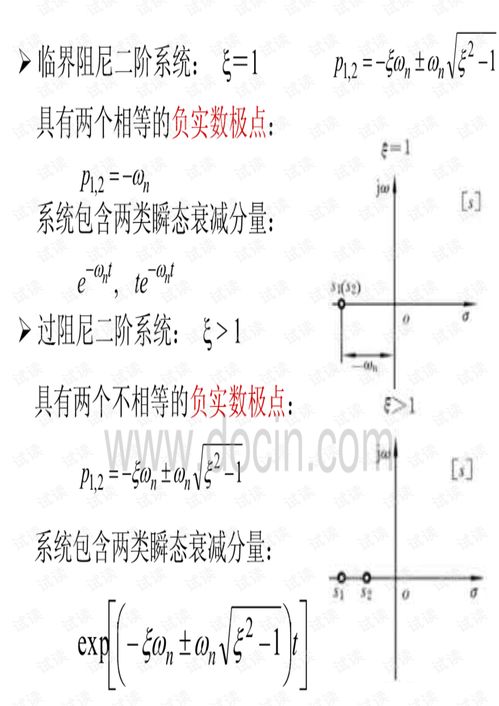
2阶系统的稳定性分析主要依赖于其特征方程的根。特征方程为:
[ r^2 + 2zetaomega_nr + omega_n^2 = 0 ]
根据特征根的实部和虚部,可以判断系统的稳定性。如果特征根的实部为负,则系统是稳定的;如果实部为零,则系统是临界稳定的;如果实部为正,则系统是不稳定的。
2阶系统的控制器设计
为了改善2阶系统的性能,通常需要设计合适的控制器。常见的控制器有比例控制器(P)、积分控制器(I)、微分控制器(D)和比例-积分-微分控制器(PID)。通过调整控制器的参数,可以优化系统的动态响应和稳态性能。
例如,使用PID控制器可以同时调整比例、积分和微分参数,以达到以下目的:
提高系统的响应速度。
减小超调量。
减小稳态误差。
2阶系统的实际应用
电机控制:在工业自动化领域,2阶系统常用于电机控制,以实现精确的位置和速度控制。
伺服系统:在机器人、数控机床等领域,2阶系统用于实现高精度的运动控制。
汽车悬挂系统:2阶系统用于模拟汽车悬挂的动态特性,以优化驾驶舒适性和安全性。
生物医学工程:在医疗设备中,2阶系统用于模拟生物组织的动态响应,以实现精确的治疗。
2阶系统是控制理论中的一个重要概念,它在工程实践中有着广泛的应用。通过对2阶系统的数学模型、性能指标、稳定性分析和控制器设计等方面的研究,可以优化系统的动态响应和稳态性能,从而提高工程系统的可靠性和效率。




教程资讯
教程资讯排行









