
帆板控制系统程序,帆板控制系统程序设计与实现概述
时间:2025-04-23 来源:网络 人气:
想象你正站在帆船的甲板上,海风轻拂,帆板随风起舞。这时,你突然意识到,帆板的每一次转动,背后都有一套精密的控制系统在默默工作。今天,就让我们一起揭开帆板控制系统程序的神秘面纱,看看它是如何让帆板在海洋中自由翱翔的。
帆板控制系统的“大脑”:微控制器
帆板控制系统的核心,无疑是一颗强大的“大脑”——微控制器。它就像帆船的指挥官,负责接收各种信息,做出决策,并指挥执行机构行动。目前,市面上常用的微控制器有STC12C5A60S2、MSP430、STM32等。
以STC12C5A60S2为例,这款单片机具有高速、低功耗、超强抗干扰等特点,内部集成了MAX810专用复位电路、2路PWM、8路高速10位AD转换器等,非常适合帆板控制系统。
角度检测:精准定位帆板姿态

帆板控制系统的第一步,就是准确测量帆板的角度。这就像给帆板装上一个“眼睛”,让它能够随时了解自己的姿态。MMA7361加速度角度传感器就是这样一个“眼睛”。
MMA7361通过测量由于重力引起的加速度,计算出器件相对于某一平面的倾斜角度。它反应灵敏、输出数据准确,且价格适中,非常适合帆板控制系统。
在测量过程中,MMA7361采用单轴倾角测量方法。由于只需要测量帆板与竖直方向的夹角,所以只需使用单个轴(即x轴)通过重力旋转即可。
控制策略:PID算法助力帆板稳定航行
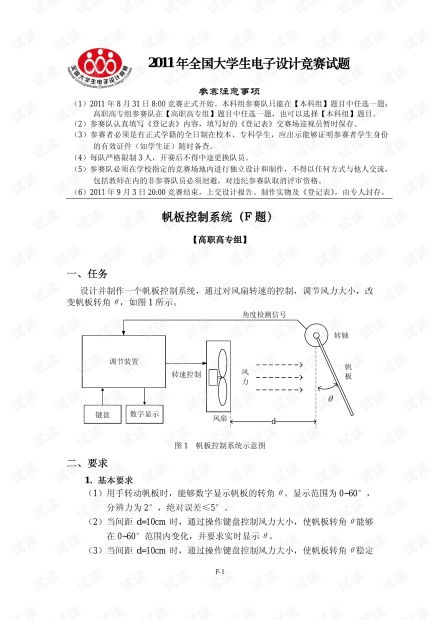
帆板控制系统的核心任务,就是根据风速、风向等环境因素,实时调整帆板的角度,确保帆船稳定航行。这就需要一套科学的控制策略。
PID(比例-积分-微分)算法是帆板控制系统中最常用的控制策略之一。它通过调整比例、积分、微分三个参数,实现对帆板角度的精确控制。
在实际应用中,PID算法可以根据风速、风向等实时数据,不断调整帆板的角度,使其始终保持在最佳状态。
执行机构:电机驱动帆板转动
帆板控制系统的执行机构,就是电机。它负责将微控制器的指令转化为实际动作,驱动帆板转动。
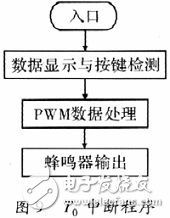
电机驱动模块通常采用PWM(脉冲宽度调制)技术,通过调整脉冲宽度来控制电机的转速。这样,就可以根据需要,精确控制帆板的角度。
人机交互:键盘输入,实时显示
为了让操作者能够实时了解帆板的状态,帆板控制系统还配备了人机交互模块。
操作者可以通过键盘输入预置角度,微控制器会根据这个角度和实时数据,计算出最佳控制策略,并指挥电机驱动帆板转动。
同时,系统还会将帆板的角度实时显示在屏幕上,让操作者一目了然。
:帆板控制系统程序的奥秘
帆板控制系统程序,就像一个精密的仪器,它将微控制器、传感器、电机等部件紧密联系在一起,共同完成帆板控制任务。
通过这套系统,帆板可以像有了生命一样,在海洋中自由翱翔。而对于我们来说,了解帆板控制系统的奥秘,不仅能让我们更好地欣赏帆船的美,还能让我们对自动化技术有更深入的认识。
相关推荐




教程资讯
教程资讯排行









