
非最小相位系统稳定性,非最小相位系统稳定性分析及其对控制性能的影响
时间:2025-01-16 来源:网络 人气:
你知道吗?在控制系统的世界里,有一种系统特别让人头疼,它就是非最小相位系统。听起来是不是有点陌生?别急,让我带你一探究竟,看看这个“麻烦制造者”到底是个啥样,又是如何影响系统稳定性的。
非最小相位系统:隐藏在系统背后的“隐形杀手”
非最小相位系统,听起来是不是有点高大上?其实,它就是那些传递函数G(s)中,零点或极点位于S平面的右半平面的系统。简单来说,就是这些系统的相位响应在频率从零变化到无穷大时,相位角的变化范围总是大于最小相位系统的相角范围。听起来是不是有点绕?别担心,我来举个例子。
想象你正在驾驶一辆车,这辆车就是我们的控制系统。最小相位系统就像一辆性能稳定、反应灵敏的赛车,而非最小相位系统则像一辆时不时给你来个“惊喜”的拖拉机。这种“惊喜”就是过大的相位滞后,它会让你的车在行驶过程中,突然变得反应迟钝,甚至可能让你失去控制。
非最小相位系统稳定性:一场与时间的赛跑
那么,非最小相位系统稳定性到底是个啥呢?简单来说,就是系统在受到干扰或变化时,能否保持稳定运行。这就像一场与时间的赛跑,系统需要在不断变化的环境中,保持稳定,不被“淘汰”。
非最小相位系统的稳定性问题,主要表现在以下几个方面:
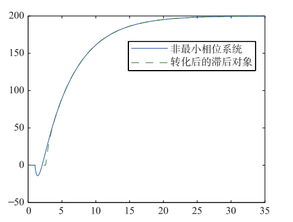
1. 相位滞后:正如前面所说,非最小相位系统存在过大的相位滞后,这会导致系统响应变慢,甚至出现不稳定现象。
2. 频率响应:非最小相位系统的频率响应特性与最小相位系统不同,这会影响系统的性能。
3. 控制器设计:对于非最小相位系统,控制器的设计要比最小相位系统复杂得多,需要考虑更多的因素。
应对非最小相位系统稳定性:一场技术盛宴
面对非最小相位系统稳定性问题,工程师们可是使出了浑身解数。以下是一些应对策略:
1. 鲁棒控制:鲁棒控制是一种针对不确定系统控制器设计的有效方法,可以保证系统在受到干扰或变化时,仍能保持稳定。
2. LMI方法:线性矩阵不等式(LMI)是一种在控制领域广泛应用的数学工具,可以用于设计鲁棒控制器。
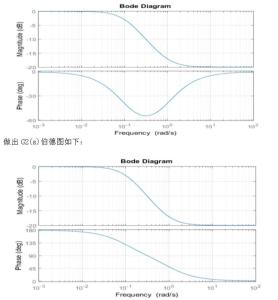
3. Bode图:Bode图是一种用于分析系统频率响应的图表,可以帮助我们判断系统的稳定性。
4. 奈氏判据:奈氏判据是一种基于奈奎斯特曲线的稳定性判据,可以用于判断系统的稳定性。
5. 对数频率特性:对数频率特性是一种用于分析系统频率响应的方法,可以帮助我们计算系统的相位裕量和增益裕量。
:非最小相位系统稳定性,一场永无止境的挑战
非最小相位系统稳定性问题,就像一场永无止境的挑战。虽然它给控制系统带来了诸多困扰,但正是这些挑战,让控制系统领域充满了无限可能。让我们一起努力,攻克这个难题,让控制系统更加稳定、可靠,为我们的生活带来更多便利。




教程资讯
教程资讯排行





![[][][] 航空订票软件官方版下载地址v1.2.0](/uploads/allimg/20251216/10-25121623242QH.jpg)



